Magnetic Transporters > Precision Magnetic Manipulators: DBLOP/DBLOM and DBLRP/DBLRM
All units are manufactured to customer specified travel lengths and are easily customized for unique applications. PMMs can be operated manually or combined with motorized drive assemblies.
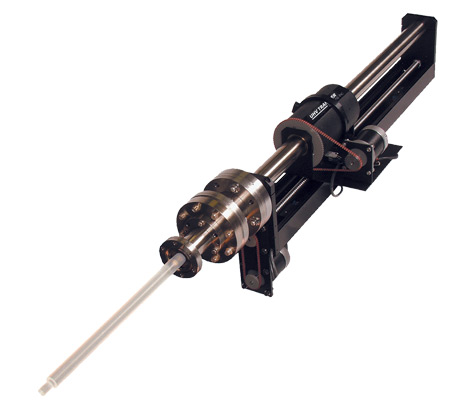
High Performance Precision Magnetic Manipulator (PMM) with Linear and Linear/Rotary Motion
High performance PMMs handle a higher de-coupling force and torque and exhibit better compliance than typically expected from a magnetically-coupled transporter. This increased force and torque results in greater tactile feedback and lower backlash. Available with linear-only and linear/rotary motion, PMMs are manufactured with all-metal internal construction for use in high vacuum, ultra-high vacuum or controlled environments. These transporters are bakeable to 250°C. This high decoupling force allows positioning to be vertical as well as horizontal.
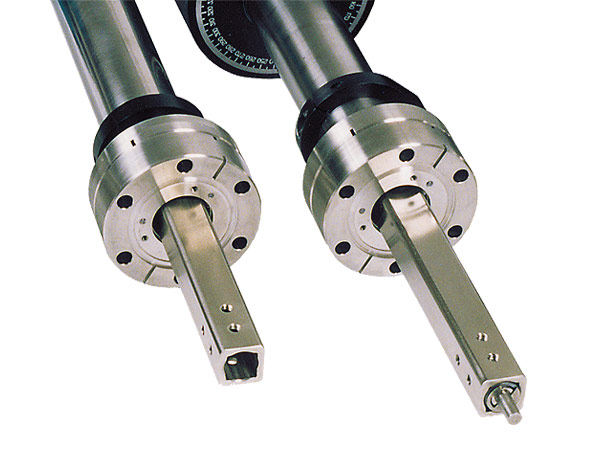
Patented independent linear and rotary motion is the key to versatility in Models DBLRP and DBLRM. Dual shafts—a round rotation shaft contained within a strong, hollow, square, linear shaft, allow numerous variations in sample movement. Both shafts travel in the linear direction as the magnet carriage is moved forward. Rotating the magnet carriage rotates the inner shaft only. This rotating shaft can be used to operate clamping devices, vertical lift mechanisms, locks and rotatable stages. Typical accessories are shown in PMM Accessories. Models DBLRP and DBLRM meet the same performance specifications but the difference in "feel" during transfer makes each preferred for different applications.
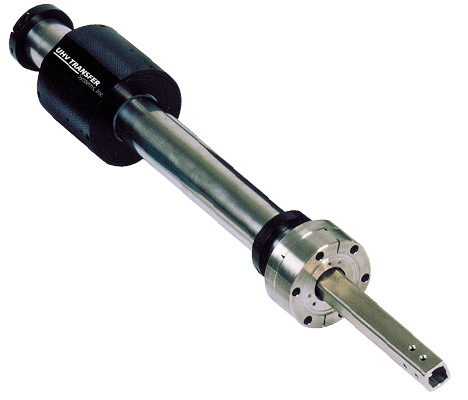
For linear-only motion, the Models DBLOP and DBLOM have the same high-decoupling strength described above. The strong, square hollow shaft that extends during transfer exhibits minimal droop over long transfer distances.
The magnet carriages of the Models DBLRM and DBLOM roll on steel bearings. These units are ideal for applications where excellent tactile feedback is desired or for high duty-cycle use. The Models DBLRP and DBLOP use polymeric bushings in the magnet carriage (outside of vacuum) to glide along the outer tube. These units are for use where a slight stiction is preferred.
SPECIFICATIONS AND DESCRIPTION
| MODEL | DBLRP, DBLRM, DBLOP, DBLOM |
|---|---|
| Material | |
| Flange, Outer tube and square shaft | 304ss |
| Actuator Housing | Anodized Aluminum |
| Performance | |
| Vacuum Range | 1x10-11 Torr |
| Linear Decoupling | 26 lbs. |
| Rotary Torque | 12 in-lbs* |
| Rotary Compliance | 2 degrees/in-lb* |
| Mounting | 2.75" CF |
| * Not applicable for DBLOP/DBLOM See PMM Datasheet for more specifications Specifications subject to change without notice. |
|
DIAGRAM OF TYPICAL Model DBLRP/DBLRM

DIAGRAM OF TYPICAL Model DBLOP/DBLOM
CUSTOMIZED MAGNETIC MANIPULATORS
Precision Magnetic Manipulators can be customized to meet a wide range of configurations. Internal shafts can be machined with threads, threaded holes, flats or slots. Shafts can be constructed of different materials such as the quartz shaft shown for use in a furnace. Optional items such as bakeable magnets and configurations with triple the de-coupling force are just a few examples. Call us to discuss your requirements.