Magnetic Transporters > Motorization: Mechanical Drive Assemblies

Model KLMDA shown assembled with Model DBLOM, Precision Magnetic Manipulator, along with Model ALMCS, Motion Control Box and Joystick.
Mechanical Drive Assemblies
Models KLMDA and MAMDR extend the range of applications for the UHV Transfer Systems Precision Magnetic Manipulator (PMM) by allowing remote operation and computer control. These Mechanical Drive Assemblies and related components will work with the entire Transfer Engineering family of magnetically coupled linear, rotary and linear/rotary manipulators.
The Mechanical Drive Assemblies provide expanded capability and convenience in several situations by providing:
- Reproducible motion using stepper motors with control pad or computer control
- Resistance to external forces (they overcome the gravitational problems predominant to vertical applications)
- Remote operation when the magnetic manipulator is either very long or is inaccessibly mounted.
SPECIFICATIONS AND DESCRIPTION
| MODEL | KLMDA |
|---|---|
| Description | |
| Weight | 4 lbs + 2 lbs/foot of travel |
| Dimensions | |
| Height | 6" |
| Width | 3.25" |
| Length | Same as PMM |
| Orientation | Vertical or Horizontal (Drive above or below PMM) |
| Mounting | 2.75" CF |
| MODEL | MAMDR |
| Description | |
| Dependent on manipulator it drives. | |
| * Not applicable for DBLOP/DBLOM See PMM Datasheet for more specifications Specifications subject to change without notice. |
|
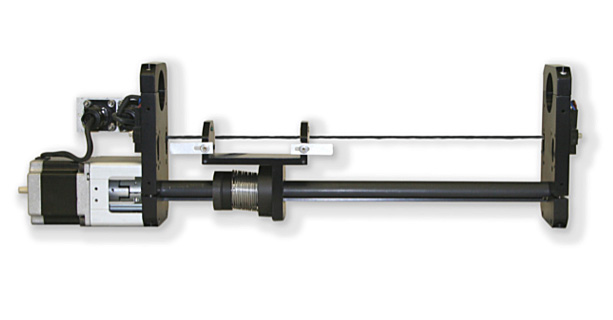
Model KLMDA shown with stepper motor attached.